Recientemente he concluido el curso de entrenador de Club de Atletismo impartido por la RFEA. La finalidad con la que accedí a este curso es la de conocer mejor aquellas disciplinas que no he practicado, en especial los saltos y los lanzamientos, puesto que mi especialidad cuando competía eran las carreras de media distancia. En los últimos tiempos se está asimilando Atletismo a carreras, especialmente en ruta. Esta decadencia del atletismo como deporte desarrollado en un estadio ya se ha vivido en el ciclismo, donde la cultura del ciclismo de pista es escasa y tan minoritaria como la del atletismo que se desarrolla en pista si no menor.
Con ello, los deportistas estamos perdiendo versatilidad y los jóvenes cada vez es más probable que vean empobrecida su cultura física. Rara vez utilizo el adjetivo culto para referirme a una persona. La cultura va por parcelas. Una persona puede tener un amplio conocimiento de la cultura escrita (novela, filosofía, poesía) y carecer de conocimientos matemáticos, con lo que su cultura científica será pobre. A su vez, una persona enormemente cultivada en literatura y en ciencias, puede tener un nulo conocimiento de agricultura, de botánica y de cocina. Pero además de la cultura literaria, filosófica, científica y culinaria, existe también una cultura física. No en vano a la asignatura que se sigue impartiendo en colegios e institutos se le denomina educación física.
¿Qué es educación física? Pues básicamente es un buen conocimiento del cuerpo en su función motriz. Equilibrio, fuerza, movilidad, agilidad, rapidez, coordinación, son cualidades importantes en cualquier deporte, pero ocurre que desde siempre en España (con contadas excepciones más debida a buenos profesores de educación física que a la previsión y planificación del sistema educativo en este ámbito) los niños empiezan a especializarse en deportes sin tener una buena formación física. He visto a atletas de enorme calidad con una torpeza motriz considerable. Esto no se debe a la falta de talento, sino a la ausencia de una disciplina física desde la niñez. Ni ricos ni pobres son enseñados a bailar, la gimnasia deportiva ya no está de moda, y los niños cada vez juegan en entornos menos accidentados, el calzado es cada día más blando y sobre todo, se comienza a practicar determinados deportes sin una formación básica que se debería garantizar en los colegios.
En los países de la órbita de la URSS los buenos resultados, a mi juicio, no se debían, como se suele creer, a que aventajaban al resto en prácticas dopantes. Quizá en el caso de las mujeres, en estos países había menos reparos en abusar de los anabolizantes porque las ventajas que concedía el éxito deportivo superaban las desventajas que la desfeminización podía suponer en una sociedad de aquellas características. Pero fundamentalmente el éxito de estos países se debía a la disciplina en el estudio y en la práctica de las diversas especialidades, que se conocían hasta el más mínimo detalle. Los mejores libros de atletismo siguen siendo de los años 70 y 80s y de algunos de los mencionados países. Fueron estos países los que mejor enseñaron la cultura fisica. Por ello destacaron siempre en danza, en patinaje, en gimnasia, especialidades todas ellas donde la técnica (es decir, la fuerza bien empleada, bien dirigida) era el factor predominante.
Tengo la impresión de que en los últimos años, el rendimiento medio de los niños en deportes está bajando porque la educación física cada vez es más lúdica y menos didáctica y porque, a su vez, las clases de educación física se han convertido en un popurrí de especialidades deportivas. Se enseñan deportes, pero no a conocer el movimiento desde sus cimientos. Y no se enseña porque a los profesores de educación física cada vez se les enseñan más especialidades deportivas, y cada vez menos los fundamentos del movimiento humano. Cada vez se hace menos trepa de cuerda, salto del potro, lanzamientos de balón medicinal y otros artefactos. La necesidad de proyectar fuerza sobre un artefacto unido a unas orientaciones básicas dadas por un buen profesor, educan el cuerpo del niño y contribuyen a un desarrollo armónico de su aparato locomotor.
Si a lo anterior le unimos que los niños cada vez juegan menos en los patios con su cuerpo y más con artefactos electrónicos, es obvio que las marcas atléticas permanecerán estancadas durante mucho tiempo. En la actualidad el atletismo se nutre de portentos con cualidades innatas extraordinarias, pero cada vez son menores en número los atletas decentes si bien no excesivamente dotados. Por ello, a pesar de la mejora en los medios, las marcas tienden a permanecer estancadas. No es que se haya alcanzado el límite físico del ser humano, sino que al no existir una cultura física desde la niñez, no hay una base numérica que aumente la probabilidad de que se unan el talento, una buena cultura física y los conocimientos fisiológicos, nutricionales y los medios tecnológicos actuales.
intro

sábado, 25 de noviembre de 2017
jueves, 18 de mayo de 2017
Fisiología aplicada al entrenamiento de la resistencia: hacia un nuevo paradigma (I).
Llamamos paradigma a los principios o axiomas que configuran la teoría de una ciencia o disciplina. Por ejemplo, en ciencias físicas, el paradigma aristotélico estructura la ciencia física tomando como punto de partida tendencia de los cuerpos terrestres al reposo, mientras que en el paradigma galileano los cuerpos tienen tendencia a conservar el movimiento inercia de tal modo que si no hay nada que los detenga continuarán moviéndose indefinidamente. Ahora sabemos que el paradigma galileano es más verdadero que el aristotélico, pero mediante una observación de lo que ocurre a nuestro alrededor no es para nada evidente que los cuerpos tienden a conservar el movimiento. Antes bien parece que si no actúa ninguna fuerza, todos los cuerpos tienden perder el movimiento que inicialmente tuvieron.
En fisiología aplicada al entrenamiento de la resistencia el paradigma actual es, desde hace muchos años, esencialmente metabólico. ¿Qué significa esto? Que la capacidad de prolongar un esfuerzo en el tiempo trata de explicarse por los profesionales del entrenamiento como una función de dos grandes vías metabólicas: la oxidativa y la no oxidativa (que equivale a la distinción entre vía aeróbica y anaeróbica, respectivamente). Los especialistas en entrenamiento de la resistencia tienden a condicionar la aptitud de mantener la intensidad de un esfuerzo a la aptitud del atleta de mantener activa una vía metabólica. Por tanto, el metabolismo toma protagonismo en la teoría del entrenamiento como principal factor limitante. Si por determinadas razones (tales como escasez de oxígeno en la atmósfera, exceso de acidez en la sangre, anemia, insuficiencia cardiaca) no es posible mantener activa una de las dos vías metabólicas, el individuo no podrá mantener la intensidad del esfuerzo.
¿Es una buena aproximación a la realidad considerar el metabolismo como principal factor limitante? Cuando se enfoca el entrenamiento de resistencia desde un paradigma metabólico, parecen no tener demasiada importancia la fatiga muscular y neural. Es como si el individuo siempre fuera capaz en cualquier momento de activar sus vías metabólicas con la misma efectividad independientemente de su motivación, su estado de ánimo, el predominio de uno y otro tipo de fibras musculares y sus niveles enzimáticos.
El paradigma metabólico del entrenamiento de resistencia tiende a equiparar el funcionamiento del cuerpo humano al de un vehículo a motor, donde la sangre sería el carburante, los pulmones el carburador y las mitocondrias la cámara de combustión y el corazón el pistón. En realidad un motor de combustión es mucho más sencillo en su funcionamiento que el aparato locomotor humano. Mientras en un vehículo, motor, dirección, transmisión y suspensión tienen cierta autonomía, en el cuerpo humano no ocurre así. El músculo hace las funciones de motor (ya que en él tienen lugar una serie de reacciones cuyo fin último es degradar y resintetizar ATP, que es el combustible de la célula). El corazón es en su mayor parte músculo y las propias arterias -que conducen la sangre bombeada por el ventrículo izquierdo- contienen músculo en sus paredes que permiten modificar el calibre de las mismas.
Como se puede ver, el metabolismo depende en gran medida de la contracción de músculos, tanto de un músculo estriado -el miocardio- como de un músculo liso como el que rodea los vasos sanguíneos. Los músculos del aparato locomotor mediante su contracción oprimen también las venas, facilitando el retorno de sangre con menor contenido en oxígeno a la aurícula derecha, para ser bombeada por el ventrículo derecho a los pulmones y tomar así oxígeno. Para captar oxígeno es necesario que se llenen los pulmones de aire renovado. Para que el aire se renueve en el interior de los pulmones, es necesario que éste sea previamente expulsado de los mismos. Para este proceso sucesivo de espiración-inspiración, es importante que funcionen eficientemente ciertos músculos, entre los cuales tiene un lugar destacado el diafragma, pero también los músculos intercostales, los pectorales, el transverso del abdomen, el recto del abdomen, los oblicuos del abdomen, los serratos y el dorsal ancho. De modo que hay músculos que inciden no sólo en la locomoción sino que a su vez facilitan la respiración. Del mismo modo, la retención del aire que inspiramos permite crear con el concurso de los músculos abdominales una presión intraabdominal que opera como una suspensión hidráulica confiriendo estabilidad adicional a las vértebras en ciertos esfuerzos en que las articulaciones intervertebrales pueden verse comprometidas.
De lo dicho en el párrafo anterior se desprende que nuestras células realizan múltiples funciones. El músculo permite la locomoción, pero también permite un buen funcionamiento del sistema cardiorespiratorio. El sistema respiratorio a su vez actúa como una especie de suspensión neumática que dota de estabilidad al raquis.
Por otra parte, se induce a confusión cuando se habla de la vía metabólica aeróbica (u oxidativa) como vía independiente de la anaeróbica (no oxidativa), cuando lo que sucede en realidad es que hay un único ciclo metabólico que en alguna de sus fases se bifurca en diversas vías según el sustrato energético y según si interviene o no la oxidación, pero que es común en el resto de las fases.
Entiendo que el paradigma del entrenamiento de resistencia no debe ser la disponibilidad de las vías metabólicas, sino las diversas formas en que opera la fatiga. Fatiga es todo aquello que inhibe la acción muscular. La insuficiencia de sustrato energético, como es el caso de la glucosa, puede impedir que se pueda mantener la intensidad del ejercicio, aunque en la práctica, antes de que eso ocurra, el sistema nervioso ha puesto en funcionamiento mecanismos de inhibición muscular para evitar el agotamiento total de la glucosa en el organismo. Nuestro sistema nervioso inhibe la acción muscular antes de que pueda tener lugar una insuficiencia cardiaca, un riesgo de agotamiento de la glucosa o una reducción excesiva del PH sanguíneo por poner ejemplos significativos.
De las cuestiones aquí apuntadas se tratará en las siguientes entradas.
En fisiología aplicada al entrenamiento de la resistencia el paradigma actual es, desde hace muchos años, esencialmente metabólico. ¿Qué significa esto? Que la capacidad de prolongar un esfuerzo en el tiempo trata de explicarse por los profesionales del entrenamiento como una función de dos grandes vías metabólicas: la oxidativa y la no oxidativa (que equivale a la distinción entre vía aeróbica y anaeróbica, respectivamente). Los especialistas en entrenamiento de la resistencia tienden a condicionar la aptitud de mantener la intensidad de un esfuerzo a la aptitud del atleta de mantener activa una vía metabólica. Por tanto, el metabolismo toma protagonismo en la teoría del entrenamiento como principal factor limitante. Si por determinadas razones (tales como escasez de oxígeno en la atmósfera, exceso de acidez en la sangre, anemia, insuficiencia cardiaca) no es posible mantener activa una de las dos vías metabólicas, el individuo no podrá mantener la intensidad del esfuerzo.
¿Es una buena aproximación a la realidad considerar el metabolismo como principal factor limitante? Cuando se enfoca el entrenamiento de resistencia desde un paradigma metabólico, parecen no tener demasiada importancia la fatiga muscular y neural. Es como si el individuo siempre fuera capaz en cualquier momento de activar sus vías metabólicas con la misma efectividad independientemente de su motivación, su estado de ánimo, el predominio de uno y otro tipo de fibras musculares y sus niveles enzimáticos.
El paradigma metabólico del entrenamiento de resistencia tiende a equiparar el funcionamiento del cuerpo humano al de un vehículo a motor, donde la sangre sería el carburante, los pulmones el carburador y las mitocondrias la cámara de combustión y el corazón el pistón. En realidad un motor de combustión es mucho más sencillo en su funcionamiento que el aparato locomotor humano. Mientras en un vehículo, motor, dirección, transmisión y suspensión tienen cierta autonomía, en el cuerpo humano no ocurre así. El músculo hace las funciones de motor (ya que en él tienen lugar una serie de reacciones cuyo fin último es degradar y resintetizar ATP, que es el combustible de la célula). El corazón es en su mayor parte músculo y las propias arterias -que conducen la sangre bombeada por el ventrículo izquierdo- contienen músculo en sus paredes que permiten modificar el calibre de las mismas.
Como se puede ver, el metabolismo depende en gran medida de la contracción de músculos, tanto de un músculo estriado -el miocardio- como de un músculo liso como el que rodea los vasos sanguíneos. Los músculos del aparato locomotor mediante su contracción oprimen también las venas, facilitando el retorno de sangre con menor contenido en oxígeno a la aurícula derecha, para ser bombeada por el ventrículo derecho a los pulmones y tomar así oxígeno. Para captar oxígeno es necesario que se llenen los pulmones de aire renovado. Para que el aire se renueve en el interior de los pulmones, es necesario que éste sea previamente expulsado de los mismos. Para este proceso sucesivo de espiración-inspiración, es importante que funcionen eficientemente ciertos músculos, entre los cuales tiene un lugar destacado el diafragma, pero también los músculos intercostales, los pectorales, el transverso del abdomen, el recto del abdomen, los oblicuos del abdomen, los serratos y el dorsal ancho. De modo que hay músculos que inciden no sólo en la locomoción sino que a su vez facilitan la respiración. Del mismo modo, la retención del aire que inspiramos permite crear con el concurso de los músculos abdominales una presión intraabdominal que opera como una suspensión hidráulica confiriendo estabilidad adicional a las vértebras en ciertos esfuerzos en que las articulaciones intervertebrales pueden verse comprometidas.
De lo dicho en el párrafo anterior se desprende que nuestras células realizan múltiples funciones. El músculo permite la locomoción, pero también permite un buen funcionamiento del sistema cardiorespiratorio. El sistema respiratorio a su vez actúa como una especie de suspensión neumática que dota de estabilidad al raquis.
Por otra parte, se induce a confusión cuando se habla de la vía metabólica aeróbica (u oxidativa) como vía independiente de la anaeróbica (no oxidativa), cuando lo que sucede en realidad es que hay un único ciclo metabólico que en alguna de sus fases se bifurca en diversas vías según el sustrato energético y según si interviene o no la oxidación, pero que es común en el resto de las fases.
Entiendo que el paradigma del entrenamiento de resistencia no debe ser la disponibilidad de las vías metabólicas, sino las diversas formas en que opera la fatiga. Fatiga es todo aquello que inhibe la acción muscular. La insuficiencia de sustrato energético, como es el caso de la glucosa, puede impedir que se pueda mantener la intensidad del ejercicio, aunque en la práctica, antes de que eso ocurra, el sistema nervioso ha puesto en funcionamiento mecanismos de inhibición muscular para evitar el agotamiento total de la glucosa en el organismo. Nuestro sistema nervioso inhibe la acción muscular antes de que pueda tener lugar una insuficiencia cardiaca, un riesgo de agotamiento de la glucosa o una reducción excesiva del PH sanguíneo por poner ejemplos significativos.
De las cuestiones aquí apuntadas se tratará en las siguientes entradas.
lunes, 17 de abril de 2017
El despliegue de la rodilla de la pierna libre.
Hace una semana o poco más, uno de mis lectores me preguntó sobre si había una simple instrucción técnica que de forma razonablemente rápida y eficaz ayudara a correr mejor.Estuve pensando en ello y llegué a la conclusión de que, probablemente, el defecto técnico más extendido esté en una prematuro despliegue de la rodilla de la pierna libre (en inglés, recovery leg).
Los buenos corredores suelen diferir al máximo del despliegue de la pierna libre, mientras que los corredores con técnicas deficientes o bien aquellos en baja forma suelen extender prematuramente la rodilla de la pierna libre, como si quisieran aterrizar lo antes posible de forma similar a como hacemos cuando nos tropezamos con algo (o nos hacen una zancadilla) y extendemos la pierna adelantada y adelantamos el pie para aterrizar de tal modo que nos evite caer de bruces. A este modo deficiente de correr algunos le llaman correr pendular, otros hablan de ciclo posterior. En realidad estos nombres vienen determinados más por el síntoma que por la causa.
Veamos las dos siguientes fotos:


La primera es de Herb Elliot, campeón de 1500 de los Juegos Olímpicos de Roma, corriendo a un ritmo en torno a 57" el 400. El de la segunda foto soy yo en una carrera de pista cubierta, en un 800 a un ritmo de 1' los 400 metros. Se puede ver que en ambas fotos nos encontramos en los últimos instantes de la propulsión en el instante que el talón de la pierna libre adelanta la pierna de apoyo. Obsérvese la flexión de rodilla de Herb Elliot y el ángulo de su tibia respecto al suelo, mientras que en el fotograma que aparezco yo la tibia apunta más al suelo.
Naturalmente no todo es una cuestión técnica. Las extremidades de Elliott son más ligeras que las mías, él tiene una mejor condición física, y tampoco el despliegue de mi pierna es sumamente prematuro ni exagerado, pero está lejos del de los buenos corredores. En la mayoría de los corredores aficionados el despliegue de la pierna libre aún más prematuro y exagerado que el mío.
Este es un aspecto al que se puede prestar atención, sobre todo en los casos en que en que el despliegue de la pierna libre es excesivamente pendular. Ejercicios de corrección adecuados para mejorar está faceta sería correr pasando vallas con una que lleguen a mitad de la altura de la tibia y que se separen entre sí alrededor de entre metro y medio y dos metros, dependiendo de la estatura y la potencia del corredor. El aterrizaje debe realizarse con el talón unos pocos centímetros por delante de la valla y el ataque los más lejos posible de la misma. Si el ataque (despegue) se realiza muy cerca de la valla y el aterrizaje muy por delante de la misma, se perpetúa el vicio de desplegar prematuramente la pierna libre. El ejercicio descrito es muy típico y creo que debe ponerse énfasis e insistirse en él para los corredores que corren con el defecto técnico descrito muy pronunciado.
Para ejemplo de despliegue prematuro y exagerado, véase el corredor que aparece en la posición más atrasada en la siguiente imagen, en el que se puede apreciar la poca flexión de rodilla a consecuencia del prematuro despliegue de ésta una vez el talón de la pierna libre adelanta la pierna de apoyo.

Además, un despliegue prematuro de la pierna libre favorecerá que el corredor impacte con el talón obligará a correr con más frecuencia de zancada, lo que provocará una mayor fatiga a un ritmo determinado.
Los buenos corredores suelen diferir al máximo del despliegue de la pierna libre, mientras que los corredores con técnicas deficientes o bien aquellos en baja forma suelen extender prematuramente la rodilla de la pierna libre, como si quisieran aterrizar lo antes posible de forma similar a como hacemos cuando nos tropezamos con algo (o nos hacen una zancadilla) y extendemos la pierna adelantada y adelantamos el pie para aterrizar de tal modo que nos evite caer de bruces. A este modo deficiente de correr algunos le llaman correr pendular, otros hablan de ciclo posterior. En realidad estos nombres vienen determinados más por el síntoma que por la causa.
Veamos las dos siguientes fotos:


La primera es de Herb Elliot, campeón de 1500 de los Juegos Olímpicos de Roma, corriendo a un ritmo en torno a 57" el 400. El de la segunda foto soy yo en una carrera de pista cubierta, en un 800 a un ritmo de 1' los 400 metros. Se puede ver que en ambas fotos nos encontramos en los últimos instantes de la propulsión en el instante que el talón de la pierna libre adelanta la pierna de apoyo. Obsérvese la flexión de rodilla de Herb Elliot y el ángulo de su tibia respecto al suelo, mientras que en el fotograma que aparezco yo la tibia apunta más al suelo.
Naturalmente no todo es una cuestión técnica. Las extremidades de Elliott son más ligeras que las mías, él tiene una mejor condición física, y tampoco el despliegue de mi pierna es sumamente prematuro ni exagerado, pero está lejos del de los buenos corredores. En la mayoría de los corredores aficionados el despliegue de la pierna libre aún más prematuro y exagerado que el mío.
Este es un aspecto al que se puede prestar atención, sobre todo en los casos en que en que el despliegue de la pierna libre es excesivamente pendular. Ejercicios de corrección adecuados para mejorar está faceta sería correr pasando vallas con una que lleguen a mitad de la altura de la tibia y que se separen entre sí alrededor de entre metro y medio y dos metros, dependiendo de la estatura y la potencia del corredor. El aterrizaje debe realizarse con el talón unos pocos centímetros por delante de la valla y el ataque los más lejos posible de la misma. Si el ataque (despegue) se realiza muy cerca de la valla y el aterrizaje muy por delante de la misma, se perpetúa el vicio de desplegar prematuramente la pierna libre. El ejercicio descrito es muy típico y creo que debe ponerse énfasis e insistirse en él para los corredores que corren con el defecto técnico descrito muy pronunciado.
Para ejemplo de despliegue prematuro y exagerado, véase el corredor que aparece en la posición más atrasada en la siguiente imagen, en el que se puede apreciar la poca flexión de rodilla a consecuencia del prematuro despliegue de ésta una vez el talón de la pierna libre adelanta la pierna de apoyo.

Además, un despliegue prematuro de la pierna libre favorecerá que el corredor impacte con el talón obligará a correr con más frecuencia de zancada, lo que provocará una mayor fatiga a un ritmo determinado.
sábado, 25 de marzo de 2017
Sobre el aterrizaje de antepié.
¿Cuál es la primera superficie de la planta del pie que debe contactar con el suelo? La respuesta a esta pregunta suele ser coincidente en la mayoría de entrenadores. Siempre con la parte delantera del pie en carreras de velocidad, y con el mediopié o con toda la planta del pie en medio fondo y fondo.
La cuestión que aquí planteo es: ¿qué hacer con un corredor que vemos que aterriza en primera instancia con el talón? ¿Tiene sentido explicarle que el aterrizaje debe tener lugar en primer lugar con la parte delantera de la planta del pie?
A mi juicio, no conviene precipitarse a la hora de dar instrucciones al corredor. Ya sé que hay muchos entrenadores que piden no entrar de talón o que al menos el aterrizaje se realice con toda la planta del pie. Pero antes de apresurarse a decir que el aterrizaje debe ser de mediopie o con toda la planta, ¿nos hemos preguntado por qué los corredores aterrizan con el talón?
En un debate sobre zapatillas en el que participé en la revista Sportraining nº 71 que se ha publicado a principios de marzo de este año, parecía haber consenso acerca del hecho de que un excesivo grosor de la suela de la zapatilla en la zona del talón dificultaba el aterrizaje con el antepié o mediopié. El drop de la zapatilla a mi juicio no aporta ninguna ventaja al corredor. Es aceptable que la zapatilla tenga amortiguación, pero el drop es difícilmente justificable. Mientras las zapatillas de correr tengan en torno a 1 cm de drop será poco fructífero insistir a los corredores que no aterricen con el talón o que el talón no toque el suelo en primera instancia. ¿Por qué? Porque en este caso, para que el talón no sea la primera parte de la zapatilla que toque el suelo, el corredor deberá:
a)Bien aterrizar más cerca de la proyección vertical en el suelo de su centro de masas, de modo que el tiempo de contacto será más breve. Si esto se lleva al extremo, se corre el riesgo de que el tiempo de contacto sea demasiado breve para el ritmo al que se está corriendo. Al generarse el mismo impulso en menos tiempo, la fuerza que se debe generar es mayor, lo que conduce a una fatiga muscular y a un gasto energético mayores. O bien el impulso vertical debe ser menor y con ello la duración de la fase aérea, de modo que la frecuencia de zancada aumentaría con el consiguiente incremento del gasto energético. Otra cosa es acortar la distancia del apoyo a la proyección vertical del centro de masas a ritmos máximos o cercanos al máximo, especialmente en corredores capaces de generar mucha fuerza en poco tiempo por tener predominio de fibras de contracción rápida.
b) Incrementar la flexión de rodilla, lo que permite que al aterrizar la tibia esté perpendicular al suelo. Si no es así, el aterrizaje deberá ser de talón. Una excesiva flexión de rodilla supone un mayor momento de fuerza a afrontar por el cuádriceps, lo que puede llevar a una fatiga muscular muscular prematura y mayor gasto energético.
c) Excesiva flexión plantar de tobillo, con lo que los músculos flexores plantares estarán excesivamente acortados no siendo aptos para generar la suficiente fuerza, a menos que se recluten más fibras de gemelos y sóleos a un ritmo dado. Cuando se trata de ritmos medios y bajos una excesiva flexión plantar en el apoyo no es sostenible.

d) Es habitual ver a corredores que aterrizan con el antepié, pero dejando que el tobillo ceda bruscamente (ya que en esa posición tiene menos fuerza) dando lugar a que acto seguido el talón impacte en el suelo. En el siguiente vídeo se ve un corredor que con un pie (el izquierdo) aterriza con menor grado de flexión plantar y con el otro (el derecho) lo hace con una flexión plantar más pronunciada, lo que da lugar a que el tobillo de este último pie ceda y el talón impacte con el suelo dando lugar a que disminuya el estímulo que desencadena el reflejo de estiramiento sobre los gemelos y la subsiguiente disminución brusca de la generación de fuerza-como se aprecia en la gráfica. En la gráfica de las fuerzas de reacción del suelo (GRF, ground reaction force) generadas en el impacto del pie derecho, donde el atleta no puede mantener una mayor flexión plantar (pie de bailarina), se genera un subsiguiente impacto con el talón con el suelo, lo que da lugar a un doble pico de fuerza. En cambio el impacto del pie izquierdo, cuyo tobillo se encuentra en una posición más neutra dando lugar a un aterrizaje más suave, se aprecia un sólo pico de fuerza.
Curiosamente, en el la siguiente imagen, obtenida de la página 209 del libro "Biomechanics of Distance Running" de Peter R. Cavanagh, aparecen dos gráficas de las fuerzas de reacción del suelo. La de la izquierda se refiere a un corredor que impacta activamente con el talón, mientras que la de la de la derecha representa un corredor que apoya con toda la planta del pie. Los perfiles de la gráfica son similares a los referidos en el párrafo anterior, respectivamente, para pie derecho y pie izquierdo. Lo peculiar es que el corredor que aparecía en el vídeo aterriza en ambos pies con el antepié, por lo que no se puede asociar exclusivamente una gráfica de doble pico a un apoyo inicial de talón.

Por otra parte, en las gráficas de fuerza de reacción del suelo (GFR) en velocistas de buen nivel corriendo en carrera lanzada de 100 metros, aparecen dobles picos, con la peculiaridad de que el primer pico es más elevado que el segundo. Esto ocurre porque los flexores plantares son capaces de generar más fuerza excéntrica en la primera fase del apoyo que concéntrica en la segunda fase.
El aterrizaje del pie, a mi juicio debe ser el resultado de un equilibrio de los factores expuestos en los apartados a, b y c. Es decir, no se debe aterrizar ni demasiado lejos ni demasiado cerca de la proyección vertical del centro de masas, se debe flexionar la rodilla en mayor medida cuanto menor sea la velocidad de desplazamiento para permitir que el apoyo se busque más adelantado respecto a la proyección vertical del centro de masas, aunque dicha flexión de rodilla no debe ser excesiva. Por último, el grado de flexión plantar debe ser mayor cuanto mayor es la velocidad. A velocidades bajas, el tejido conjuntivo que opera en paralelo a las fibras musculares limitará la flexión dorsal con menor gasto de energía, pero a velocidades altas donde se requiere mayor generación de fuerza, el complejo músculo-tendón tiende a acortarse. Un músculo más corto es más eficaz generando fuerza cuando sus fibras están acortadas.
a)Bien aterrizar más cerca de la proyección vertical en el suelo de su centro de masas, de modo que el tiempo de contacto será más breve. Si esto se lleva al extremo, se corre el riesgo de que el tiempo de contacto sea demasiado breve para el ritmo al que se está corriendo. Al generarse el mismo impulso en menos tiempo, la fuerza que se debe generar es mayor, lo que conduce a una fatiga muscular y a un gasto energético mayores. O bien el impulso vertical debe ser menor y con ello la duración de la fase aérea, de modo que la frecuencia de zancada aumentaría con el consiguiente incremento del gasto energético. Otra cosa es acortar la distancia del apoyo a la proyección vertical del centro de masas a ritmos máximos o cercanos al máximo, especialmente en corredores capaces de generar mucha fuerza en poco tiempo por tener predominio de fibras de contracción rápida.
b) Incrementar la flexión de rodilla, lo que permite que al aterrizar la tibia esté perpendicular al suelo. Si no es así, el aterrizaje deberá ser de talón. Una excesiva flexión de rodilla supone un mayor momento de fuerza a afrontar por el cuádriceps, lo que puede llevar a una fatiga muscular muscular prematura y mayor gasto energético.
c) Excesiva flexión plantar de tobillo, con lo que los músculos flexores plantares estarán excesivamente acortados no siendo aptos para generar la suficiente fuerza, a menos que se recluten más fibras de gemelos y sóleos a un ritmo dado. Cuando se trata de ritmos medios y bajos una excesiva flexión plantar en el apoyo no es sostenible.

d) Es habitual ver a corredores que aterrizan con el antepié, pero dejando que el tobillo ceda bruscamente (ya que en esa posición tiene menos fuerza) dando lugar a que acto seguido el talón impacte en el suelo. En el siguiente vídeo se ve un corredor que con un pie (el izquierdo) aterriza con menor grado de flexión plantar y con el otro (el derecho) lo hace con una flexión plantar más pronunciada, lo que da lugar a que el tobillo de este último pie ceda y el talón impacte con el suelo dando lugar a que disminuya el estímulo que desencadena el reflejo de estiramiento sobre los gemelos y la subsiguiente disminución brusca de la generación de fuerza-como se aprecia en la gráfica. En la gráfica de las fuerzas de reacción del suelo (GRF, ground reaction force) generadas en el impacto del pie derecho, donde el atleta no puede mantener una mayor flexión plantar (pie de bailarina), se genera un subsiguiente impacto con el talón con el suelo, lo que da lugar a un doble pico de fuerza. En cambio el impacto del pie izquierdo, cuyo tobillo se encuentra en una posición más neutra dando lugar a un aterrizaje más suave, se aprecia un sólo pico de fuerza.
Curiosamente, en el la siguiente imagen, obtenida de la página 209 del libro "Biomechanics of Distance Running" de Peter R. Cavanagh, aparecen dos gráficas de las fuerzas de reacción del suelo. La de la izquierda se refiere a un corredor que impacta activamente con el talón, mientras que la de la de la derecha representa un corredor que apoya con toda la planta del pie. Los perfiles de la gráfica son similares a los referidos en el párrafo anterior, respectivamente, para pie derecho y pie izquierdo. Lo peculiar es que el corredor que aparecía en el vídeo aterriza en ambos pies con el antepié, por lo que no se puede asociar exclusivamente una gráfica de doble pico a un apoyo inicial de talón.

Por otra parte, en las gráficas de fuerza de reacción del suelo (GFR) en velocistas de buen nivel corriendo en carrera lanzada de 100 metros, aparecen dobles picos, con la peculiaridad de que el primer pico es más elevado que el segundo. Esto ocurre porque los flexores plantares son capaces de generar más fuerza excéntrica en la primera fase del apoyo que concéntrica en la segunda fase.
El aterrizaje del pie, a mi juicio debe ser el resultado de un equilibrio de los factores expuestos en los apartados a, b y c. Es decir, no se debe aterrizar ni demasiado lejos ni demasiado cerca de la proyección vertical del centro de masas, se debe flexionar la rodilla en mayor medida cuanto menor sea la velocidad de desplazamiento para permitir que el apoyo se busque más adelantado respecto a la proyección vertical del centro de masas, aunque dicha flexión de rodilla no debe ser excesiva. Por último, el grado de flexión plantar debe ser mayor cuanto mayor es la velocidad. A velocidades bajas, el tejido conjuntivo que opera en paralelo a las fibras musculares limitará la flexión dorsal con menor gasto de energía, pero a velocidades altas donde se requiere mayor generación de fuerza, el complejo músculo-tendón tiende a acortarse. Un músculo más corto es más eficaz generando fuerza cuando sus fibras están acortadas.
Para que el talón no toque el suelo con zapatillas cuyo drop esté en torno al centímetro, el pie deberá estar en un mayor grado de flexión plantar, con una mayor flexión de rodilla o se deberá aterrizar más cerca de la proyección vertical del centro de masas. Estas tres acciones, si son excesivas, merman la economía de carrera a ritmos medios. Con un drop excesivo es incluso preferible dejar que el talón sea lo primero que toque el suelo, pero aquí conviene hacer un matiz, ya que hay dos formas de aterrizar con el talón:
-Aterrizaje activo con el talón, lo que tiene lugar cuando los flexores dorsales (tibial anterior y extensores de los dedos de los pies) están dominando sobre los flexores plantares (gemelos, sóleos, tibial posterior y flexores de los dedos de los pies). Este tipo de aterrizaje de talón es propio de actividades como la marcha atlética, pero en ella el impacto con el talón no es tan violento porque en el instante del aterrizaje la trayectoria del centro de masas es practicamente plana y no descendente como en la carrera a pie, de modo que el talón sólo debe soportar el peso corporal. En cambio, en un talonamiento activo corriendo, el talón debe soportar además del peso corporal la deceleración del descenso del centro de masas del corredor.
Lo peor del aterrizaje activo con el talón no es tanto que el corredor tienda a frenarse (más se frenaría si manteniendo todo lo demás igual, aterrizara con el antepie, ya que el apoyo sería más adelantado y el frenado mayor por consiguiente) o que pueda dañarse el calcáneo (esto se evita con amortiguación en el talón engrosando y acolchando la suela a la altura del mismo). Lo peor de realizar un aterrizaje activo con el talón es que se tiene que hacer una transición del dominio de los flexores dorsales a los flexores plantares, y toda transición requiere tiempo, con la consiguiente merma de impulso generado contra el suelo que hace el correr ineficiente. Desde el momento del aterrizaje debe dominar el torque generado por los flexores plantares porque durante el apoyo deberá decelerarse la flexión dorsal de tobillo para acto seguido generarse una flexión plantar. Cuando se realiza un talonamiento activo primero se produce una flexión plantar que será frenada por los flexores dorsales, luego una flexión dorsal que será decelerada hasta detenerse por los flexores plantares, seguida de una nueva flexión plantar generada también por estos últimos. En la primera transición de flexión plantar a flexión dorsal con el consiguiente traspaso de predominio de los flexores dorsales a los plantares, se produce un pico de fuerza prematuro con un descenso de esta para buscar un segundo pico. Esta pérdida de fuerza en la transición del apoyo de talón al de metatarso obliga a un tiempo de apoyo más largo para generar más impulso, o bien a generar más fuerza durante el tiempo de que se dispone, todo ello en detrimento de la economía de carrera.
-El aterrizaje pasivo con el talón, que implica únicamente que el talón haga contacto con el suelo en primera instancia mientras el tobillo está realizando una acción de flexión plantar, de modo que el antepié no tarda en encontrar el suelo y, lo que es más importante, la acción de los flexores plantares predomina sobre la de los flexores dorsales desde el primer instante del aterrizaje. Aquí el talón no se hinca en el suelo, sino que lame el suelo con poca fuerza para dar lugar a una rápida toma de contacto con el antepie y a que la mayor parte de la fuerza de impacto se localice en el antepie, mientras que el talón, a pesar de que esté en contacto con el suelo, apenas genera fuerza sobre este. La mencionada forma de aterrizaje pasivo con el talón es propia de algunos buenos corredores de maratón. Esta forma de aterrizaje pasivo con el talón no debe confundirse con el aterrizaje activo con el talón que se puede apreciar en el caso de numerosos corredores populares. En la imagen inferior se puede apreciar este modo de aterrizaje pasivo con el talón.
 Imagen extraída de "Explosive Running" de Michael Yessis.
Imagen extraída de "Explosive Running" de Michael Yessis.
Hay otros factores que pueden condicionar al aterrizaje, tales como la longitud del pie, la longitud del fémur en relación a la tibia, la fortaleza de los músculos del pie que actúan por debajo de la bóveda plantar oponiéndose al aplastamiento de ésta, la relación entre la distancia perpendicular entre la articulación del tobillo (que se sitúa en un punto intermedio del segmento que une los maléolos tibial y peroneo) al tendón de aquiles y la distancia entre la articulación del tobillo y la articulación metatarsofalángica (que es donde se suele apoyar el antepie al correr).

Cuanto mayor sea la segunda distancia respecto a la primera, más complicado será mantener el talón despegado del suelo durante el apoyo. Un pie con metatarsos considerablemente largos o con un tendón de aquiles proporcionalmente muy cercano a los maléolos, tiene que ser más fuerte como para mantener el talón despegado del suelo.
En todo caso confío en que lo expuesto en este artículo contribuirá a que el lector tome conciencia de que la técnica que apoyo es bastante más compleja que una simple prescripción de cómo se debe aterrizar.
-Aterrizaje activo con el talón, lo que tiene lugar cuando los flexores dorsales (tibial anterior y extensores de los dedos de los pies) están dominando sobre los flexores plantares (gemelos, sóleos, tibial posterior y flexores de los dedos de los pies). Este tipo de aterrizaje de talón es propio de actividades como la marcha atlética, pero en ella el impacto con el talón no es tan violento porque en el instante del aterrizaje la trayectoria del centro de masas es practicamente plana y no descendente como en la carrera a pie, de modo que el talón sólo debe soportar el peso corporal. En cambio, en un talonamiento activo corriendo, el talón debe soportar además del peso corporal la deceleración del descenso del centro de masas del corredor.
Lo peor del aterrizaje activo con el talón no es tanto que el corredor tienda a frenarse (más se frenaría si manteniendo todo lo demás igual, aterrizara con el antepie, ya que el apoyo sería más adelantado y el frenado mayor por consiguiente) o que pueda dañarse el calcáneo (esto se evita con amortiguación en el talón engrosando y acolchando la suela a la altura del mismo). Lo peor de realizar un aterrizaje activo con el talón es que se tiene que hacer una transición del dominio de los flexores dorsales a los flexores plantares, y toda transición requiere tiempo, con la consiguiente merma de impulso generado contra el suelo que hace el correr ineficiente. Desde el momento del aterrizaje debe dominar el torque generado por los flexores plantares porque durante el apoyo deberá decelerarse la flexión dorsal de tobillo para acto seguido generarse una flexión plantar. Cuando se realiza un talonamiento activo primero se produce una flexión plantar que será frenada por los flexores dorsales, luego una flexión dorsal que será decelerada hasta detenerse por los flexores plantares, seguida de una nueva flexión plantar generada también por estos últimos. En la primera transición de flexión plantar a flexión dorsal con el consiguiente traspaso de predominio de los flexores dorsales a los plantares, se produce un pico de fuerza prematuro con un descenso de esta para buscar un segundo pico. Esta pérdida de fuerza en la transición del apoyo de talón al de metatarso obliga a un tiempo de apoyo más largo para generar más impulso, o bien a generar más fuerza durante el tiempo de que se dispone, todo ello en detrimento de la economía de carrera.
-El aterrizaje pasivo con el talón, que implica únicamente que el talón haga contacto con el suelo en primera instancia mientras el tobillo está realizando una acción de flexión plantar, de modo que el antepié no tarda en encontrar el suelo y, lo que es más importante, la acción de los flexores plantares predomina sobre la de los flexores dorsales desde el primer instante del aterrizaje. Aquí el talón no se hinca en el suelo, sino que lame el suelo con poca fuerza para dar lugar a una rápida toma de contacto con el antepie y a que la mayor parte de la fuerza de impacto se localice en el antepie, mientras que el talón, a pesar de que esté en contacto con el suelo, apenas genera fuerza sobre este. La mencionada forma de aterrizaje pasivo con el talón es propia de algunos buenos corredores de maratón. Esta forma de aterrizaje pasivo con el talón no debe confundirse con el aterrizaje activo con el talón que se puede apreciar en el caso de numerosos corredores populares. En la imagen inferior se puede apreciar este modo de aterrizaje pasivo con el talón.

Hay otros factores que pueden condicionar al aterrizaje, tales como la longitud del pie, la longitud del fémur en relación a la tibia, la fortaleza de los músculos del pie que actúan por debajo de la bóveda plantar oponiéndose al aplastamiento de ésta, la relación entre la distancia perpendicular entre la articulación del tobillo (que se sitúa en un punto intermedio del segmento que une los maléolos tibial y peroneo) al tendón de aquiles y la distancia entre la articulación del tobillo y la articulación metatarsofalángica (que es donde se suele apoyar el antepie al correr).

Cuanto mayor sea la segunda distancia respecto a la primera, más complicado será mantener el talón despegado del suelo durante el apoyo. Un pie con metatarsos considerablemente largos o con un tendón de aquiles proporcionalmente muy cercano a los maléolos, tiene que ser más fuerte como para mantener el talón despegado del suelo.
En todo caso confío en que lo expuesto en este artículo contribuirá a que el lector tome conciencia de que la técnica que apoyo es bastante más compleja que una simple prescripción de cómo se debe aterrizar.
martes, 21 de febrero de 2017
Nociones de mecánica (II): descomposición de vectores.
En nociones de mecánica I, se ilustraba cómo se podían sumar dos o más vectores para obtener una resultante. En este capítulo nos interesa obtener, a partir de un dato como es el vector A, dos vectores B y C, cuya suma es el mismo vector A. A esto lo llamamos descomposición de vectores. La cuestión se puede plantear de otro modo: ¿la suma de qué dos vectores tiene como resultante el vector A? Por ejemplo, cuando descomponemos la fuerza de reacción que el terreno ejerce sobre un corredor (GFR, ground reaction force, en inglés), tenemos dos componentes, una perpendicular al suelo, llamada fuerza normal y otra paralela al suelo que llamamos fuerza de fricción. En la siguiente ilustración podemos imaginar como el vector con el que un atleta realiza un salto hacia delante empujando con uno o ambos pies contra el suelo, para que éste le responda con una fuerza representada por el vector A en color rojo.

H sería la fuerza de fricción y V la fuerza normal. Obviamente se trata de un eje.
No siempre nos interesará descomponer un vector en dos vectores perpendiculares. Puede suceder que las componentes de un vector que nos parezcan relevantes sean oblicuas. Así ocurre en la ilustración que aparece a continuación, donde A se descompone en dos vectores, B y C no perpendiculares entre sí.

Tanto cuando descomponemos un vector en componentes perpendiculares como cuando lo hacemos en componentes oblicuas (es decir, que no son ni perpendiculares ni paralelas), aplicamos la regla del paralelogramo a la inversa que para la suma de vectores. Es decir, que todo vector A se descompone en dos vectores B y C solamente si A es la diagonal de un paralelogramo dos de cuyos lados son B y C.

H sería la fuerza de fricción y V la fuerza normal. Obviamente se trata de un eje.
No siempre nos interesará descomponer un vector en dos vectores perpendiculares. Puede suceder que las componentes de un vector que nos parezcan relevantes sean oblicuas. Así ocurre en la ilustración que aparece a continuación, donde A se descompone en dos vectores, B y C no perpendiculares entre sí.

Tanto cuando descomponemos un vector en componentes perpendiculares como cuando lo hacemos en componentes oblicuas (es decir, que no son ni perpendiculares ni paralelas), aplicamos la regla del paralelogramo a la inversa que para la suma de vectores. Es decir, que todo vector A se descompone en dos vectores B y C solamente si A es la diagonal de un paralelogramo dos de cuyos lados son B y C.
jueves, 16 de febrero de 2017
Nociones de mecánica (I). Vectores y magnitudes vectoriales.
De cara a que se comprendan mejor algunas entradas de este blog, estoy preparando una sección de nociones de mecánica. La idea es ir construyendo, poco a poco, una base teórica lo más sólida posible de los contenidos del blog. Más adelante formularé unas recomendaciones acerca de cómo leer estas entradas de carácter más teórico y abstracto.
En mecánica se trabaja con magnitudes. Una magnitud es una cualidad de la realidad física. Tiempo, posición en el espacio, masa, momento de inercia, velocidad lineal, velocidad angular, aceleración lineal, aceleración angular, momento lineal, impulso lineal, momento angular, impulso angular, fuerza lineal, fuerza de torsión (torque), trabajo, energía y potencia son magnitudes.
Las magnitudes se designan mediante letras. A la masa se le designa con la letra m, a la energía con la letra E. Existen dos grandes clases de magnitudes: las magnitudes escalares y las vectoriales. Las magnitudes vectoriales son aquellas que tienen origen o punto de aplicación, dirección y sentido en el espacio. Por ejemplo la fuerza opera siempre en una dirección. Por ejemplo, en el caso de la fuerza gravitatoria, opera sobre todas y cada una de las partículas de un objeto, verticalmente y hacia abajo.
En cambio, las magnitudes escalares carecen de origen, dirección y sentido. Es el caso del tiempo, de la masa, del momento de inercia, el trabajo, la energía y la potencia. El tiempo no es una magnitud vectorial porque opera independientemente de la posición en el espacio y de la variación de ésta, al menos así sucede en mecánica la clásica, que estuvo vigente desde la formulación de las leyes de Newton hasta la formulación de la teoría de la relatividad restringida de Einstein. También la masa es independiente del espacio y, por tanto, se trata de una magnitud escalar. Ciertas magnitudes que resultan del producto de dos vectores pueden ser escalares, como es el caso del trabajo, la energía y la potencia. En este caso hablamos de producto escalar de dos vectores. De hecho la potencia (P) resulta por dos posibles productos: un producto escalar de los vectores de fuerza y velocidad (P= Fv=vF) y un producto de dos escalares como son el trabajo (W) y la frecuencia (1/t) con que éste tiene lugar (P=W/t).
Como se ha visto, las magnitudes escalares se simbolizan con una letra. Las vectoriales se simbolizan con una letra en negrilla (o con una flecha sobre la misma).
Para determinar si las magnitudes enumeradas en el primer párrafo son escalares o vectoriales basta saber que masa, tiempo y frecuencia son escalares. Posición y ángulo son vectoriales. Cualquier magnitud que resulta de multiplicar un vector por un escalar es vectorial. Por otra parte existen magnitudes vectoriales que resultan del producto de vectores. En este caso hablamos de producto vectorial de dos vectores. Por ejemplo, el producto del vector posición por el vector fuerza nos da como resultado el vector momento de fuerza o fuerza de torsión (torque). De hecho, el torque responde a las dos siguientes fórmulas τ = r F ó τ = I α. En el primer caso se trata del producto de dos vectores y en el segundo de un vector por un escalar. El producto de un vector por un escalar siempre es un vector. Lo mismo ocurre con el momento angular que responde a las fórmular L = m r v ó L= I ω. La primera es el producto de un escalar por un producto vectorial y la segunda el producto de un escalar por un vector. Por tanto, el momento angular es también una magnitud vectorial. Por último, trabajo, potencia y energía son magnitudes que resultan de multiplicar dos vectores en lo que se denomina producto escalar de vectores, cuyo resultado es un escalar.
A continuación se formula una tabla con las magnitudes, distinguiendo si son vectoriales o escalares e indicando la unidad del sistema internacional que se emplea para cuantificarlas.

En mecánica se trabaja con magnitudes. Una magnitud es una cualidad de la realidad física. Tiempo, posición en el espacio, masa, momento de inercia, velocidad lineal, velocidad angular, aceleración lineal, aceleración angular, momento lineal, impulso lineal, momento angular, impulso angular, fuerza lineal, fuerza de torsión (torque), trabajo, energía y potencia son magnitudes.
Las magnitudes se designan mediante letras. A la masa se le designa con la letra m, a la energía con la letra E. Existen dos grandes clases de magnitudes: las magnitudes escalares y las vectoriales. Las magnitudes vectoriales son aquellas que tienen origen o punto de aplicación, dirección y sentido en el espacio. Por ejemplo la fuerza opera siempre en una dirección. Por ejemplo, en el caso de la fuerza gravitatoria, opera sobre todas y cada una de las partículas de un objeto, verticalmente y hacia abajo.
En cambio, las magnitudes escalares carecen de origen, dirección y sentido. Es el caso del tiempo, de la masa, del momento de inercia, el trabajo, la energía y la potencia. El tiempo no es una magnitud vectorial porque opera independientemente de la posición en el espacio y de la variación de ésta, al menos así sucede en mecánica la clásica, que estuvo vigente desde la formulación de las leyes de Newton hasta la formulación de la teoría de la relatividad restringida de Einstein. También la masa es independiente del espacio y, por tanto, se trata de una magnitud escalar. Ciertas magnitudes que resultan del producto de dos vectores pueden ser escalares, como es el caso del trabajo, la energía y la potencia. En este caso hablamos de producto escalar de dos vectores. De hecho la potencia (P) resulta por dos posibles productos: un producto escalar de los vectores de fuerza y velocidad (P= Fv=vF) y un producto de dos escalares como son el trabajo (W) y la frecuencia (1/t) con que éste tiene lugar (P=W/t).
Como se ha visto, las magnitudes escalares se simbolizan con una letra. Las vectoriales se simbolizan con una letra en negrilla (o con una flecha sobre la misma).
Para determinar si las magnitudes enumeradas en el primer párrafo son escalares o vectoriales basta saber que masa, tiempo y frecuencia son escalares. Posición y ángulo son vectoriales. Cualquier magnitud que resulta de multiplicar un vector por un escalar es vectorial. Por otra parte existen magnitudes vectoriales que resultan del producto de vectores. En este caso hablamos de producto vectorial de dos vectores. Por ejemplo, el producto del vector posición por el vector fuerza nos da como resultado el vector momento de fuerza o fuerza de torsión (torque). De hecho, el torque responde a las dos siguientes fórmulas τ = r F ó τ = I α. En el primer caso se trata del producto de dos vectores y en el segundo de un vector por un escalar. El producto de un vector por un escalar siempre es un vector. Lo mismo ocurre con el momento angular que responde a las fórmular L = m r v ó L= I ω. La primera es el producto de un escalar por un producto vectorial y la segunda el producto de un escalar por un vector. Por tanto, el momento angular es también una magnitud vectorial. Por último, trabajo, potencia y energía son magnitudes que resultan de multiplicar dos vectores en lo que se denomina producto escalar de vectores, cuyo resultado es un escalar.
A continuación se formula una tabla con las magnitudes, distinguiendo si son vectoriales o escalares e indicando la unidad del sistema internacional que se emplea para cuantificarlas.
Magnitud
(símbolo)
|
Clase
|
Unidad
(Sistema internacional)
|
Masa (m)
|
Escalar
|
kilogramo (kg)
|
Momento de inercia (I)
|
Escalar
|
kilogramo metro cuadrado (kg m²)
|
Tiempo (t)
|
Escalar
|
segundo (s)
|
Frecuencia (f)
|
Escalar
|
1/segundo (1/s ó s⁻¹)
|
Posición lineal (r)
|
Vectorial
|
metro (m)
|
Posición angular (θ)
|
Vectorial
|
radián *
|
Velocidad lineal (v)
|
Vectorial
|
metro por segundo (m/s)
|
Velocidad angular (ω)
|
Vectorial
|
radián por segundo (s⁻¹)
|
Aceleración lineal (a)
|
Vectorial
|
metro por segundo al cuadrado (m s⁻²
ó m/s²)
|
Aceleración angular (α)
|
Vectorial
|
Radián por segundo al cuadrado (s⁻²
ó 1/s)
|
Momento lineal (p)
|
Vectorial
|
kilogramo metro por segundo (kg m/s ó
kg m s⁻¹)
|
Momento angular (L)
|
Vectorial
|
kilogramo metro cuadrado por segundo (kg
m² s⁻¹)
|
Fuerza lineal (F)
|
Vectorial
|
Newton (N)
|
Fuerza de torsión(τ)
|
Vectorial
|
Newton metro (N m)
|
Trabajo (W)
|
Escalar
|
Julio (J)
|
Energía (E)
|
Escalar
|
Julio (J)
|
Potencia (P)
|
Escalar
|
Watio (W)
|
*para operar con radianes, por convención para
simplificar el cálculo, no se utiliza símbolo alguno.
Fuerza, velocidad y aceleración lineales son vectores habitualmente representados en imágenes de corredores donde se representan las fuerzas en la carrera. Los vectores de una misma magnitud pueden sumarse para dar lugar a una resultante.
Un vector es un segmento que representa una magnitud y que consta de dirección y sentido.
Los elementos y características de un vector son:
Elementos.
- Origen: punto de aplicación de un vector, o lugar en el espacio donde se origina la magnitud.
- Extremo: lugar al que se dirige la acción de la magnitud. Se representa como una flecha en dicho extremo.
Características.
- Módulo: intensidad con que se da la magnitud representada por el vector. Cuando una misma magnitud es representada en una misma imagen por varios vectores, su longitud será proporcional a su módulo.
- Dirección: es la inclinación o pendiente de un vector.
- Sentido: lugar hacia el que apunta o se dirige la acción del vector.
A continuación vemos gráficamente cómo se suman dos vectores.

Si sumamos el vector A y B (de color negro y azul, respectivamente) se pueden utilizar dos métodos gráficos: uno consiste en colocar el origen de B en el extremo (o flecha) de A; el otro consiste en trazar un paralelogramo que tenga los lados equivalentes a los dos vectores. Como se ve, el vector resultante R, en rojo, es de la misma longitud, dirección y sentido.
Por otra parte, cuando se suman tres vectores, A, B y C, el primer método se puede utilizar del mismo modo que aparece en la imagen. El método del paralelogramo se puede utilizar sumando primero A y B y luego a la resultante R sumarle el vector C. La suma de vectores es conmutativa.
A+B= B+A
y con tres vectores
A+B+C=A+C+B=B+A+C=B+C+A=C+A+B=C+B+A
En la suma de vectores también se cumple la propiedad asociativa:
A+(B+C)=(A+B)+C
A+(C+B)=(A+C)+B
B+(A+C)=(B+A)+C
B+(C+A)=(B+C)+A
C+(A+B)=(C+A)+B
C+(B+A)=(C+B)+A
miércoles, 15 de febrero de 2017
¿Aterrizar por debajo del centro de masas es una directriz apropiada?
Una directriz muy habitual acerca de la técnica de carrera es el de aterrizar por debajo del centro de gravedad. Esta directriz adolece de varios inconvenientes, tanto en su forma como en su contenido:
1- ¿Qué es debajo del centro de gravedad? ¿Se refiere a la proyección sobre el suelo de la línea vertical perpendicular al suelo que atraviesa el centro de gravedad? Tomemos como punto de partida que esto es así y vayamos al siguiente inconveniente.
2- Cuando nos referimos a pisar sobre la proyección vertical del centro de gravedad, ¿a qué nos estamos refiriendo con pisar sobre ese punto? Nuestro pie no es un punto, sino un volumen y una superficie. ¿Qué parte del pie debe coincidir con la proyección vertical del centro de masas? ¿El talón, la zona del metatarso, los dedos de los pies?
En mi opinión, cuando se trata de analizar cómo tiene lugar el contacto con el suelo, el concepto a utilizar es el centro de presiones, que es la superficie infinitesimal o punto donde tiene su origen la resultante de las fuerzas que tienen lugar en el contacto del pie con el suelo.
3- Hacer que el centro de presiones coincida con la proyección vertical del centro de gravedad sobre el suelo en el impacto con el suelo, dará lugar a que las fuerzas de frenado sean nulas o prácticamente nulas. Una vez que el centro de gravedad pase inmediatamente a estar por delante del centro de presiones, las fuerzas horizontales proveerán aceleración al corredor. No tiene sentido imprimir aceleración en cada zancada si antes no hemos frenado. Si no hay fuerzas de frenado, aceleraremos en cada fase de contacto. La aceleración positiva e indefinida será en algún momento insostenible. Habrá un momento en que la velocidad será tan elevada que no tendremos tiempo de contrarrestar la rotación hacia delante que tiene lugar en nuestro cuerpo durante la aceleración. Por tanto, acabaremos cayendo de bruces si seguimos la directriz de pisar por debajo del centro de gravedad.
Los que defienden que esta directriz es válida, minimizan los inconvenientes señalados añadiendo que la directriz no se refiere a pisar justamente debajo del centro de gravedad, sino un poco por detrás. Esto todavía da lugar a más inconvenientes, porque si antes al menos sabíamos que el centro de presiones tenía que coincidir con la proyección vertical sobre el suelo del centro de gravedad, ahora no sabemos a qué distancia por detrás del centro de gravedad hemos de pisar. ¿5 centímetros, 10 centímetros, 20, 40? ¿Cuánto es poco?
Entonces siempre hay alguien que nos dice: hay que minimizar la distancia entre el centro de presiones y la proyección vertical sobre el suelo del centro de masas. Cuanto menor sea la distancia, menos frenaremos en cada zancada, con el consiguiente ahorro energético. Este es un argumento que casi todos los que hablan de técnica de carrera suscriben. Sin embargo, como ahora demostraré, es totalmente erróneo, al menos si lo interpretamos en el sentido de que el atleta tiene que minimizar esa distancia cualesquiera que sean sus condiciones físicas, cualquiera que sea la velocidad a la que esté corriendo y cualquiera que sea su grado de fatiga.
Antes de analizar la cuestión, veamos una foto de Sebastian Coe corriendo un relevo de 4X800, a un ritmo en torno a 50-51 segundos los 400 metros (para que entiendan mejor los corredores de ruta, alrededor de 2'05" -2'07" los 1000 metros, entre 7,8 y 80 m/s, es decir, alrededor de 28 km/h, lo que no es un ritmo precisamente lento). Se puede observar que entre la proyección vertical del centro de masas y el centro de presiones hay una distancia considerable, en torno a unos 45 cm.

Minimizar la distancia entre el centro de presiones de la pisada en el momento del impacto y la proyección vertical del centro de gravedad sobre el suelo, supone que tendremos muy poco tiempo para contrarrestar el descenso del centro de masas que tiene lugar en la fase aérea y la subsiguiente elevación del centro de masas para iniciar la subsiguiente fase aérea. Cuanto menor sea ese tiempo, mayor será la fuerza que hemos de aplicar para lograr un determinado impulso que devuelva el centro de masas a la altura alcanzada en la fase de vuelo anterior, ya que el impulso es el sumatorio del producto de las fuerzas por los intervalos de tiempo en que éstas se aplican.
Por tanto, minimizar la distancia referida implica aumentar la fuerza. No hemos de olvidar que la fuerza es un factor limitante. No tenemos una fuerza ilimitada. Tampoco todos los tendones tienen la misma rigidez y la misma tasa de retorno de energía elástica. Por lo tanto, no se puede afirmar como regla general que minimizar la distancia entre nuestro centro de presiones y la proyección vertical sobre el suelo del centro de masas sea algo favorable en cualquier supuesto. Ni siquiera es siempre posible reducir esa distancia. Podemos ir reduciendo esa distancia pero nos encontraremos con una de las dos siguintes circunstancias:
1- No tenemos fuerza para seguir reduciendo esa distancia.
2-Sí que disponemos de la fuerza necesaria para reducir esa distancia, pero ese aumento de la fuerza implica un incremento del gasto energético que no se compensa con el ahorro que deriva de la disminución del impulso de frenado y de posterior aceleración.
Está claro que cuanto más cerca pisemos de la proyección del centro de gravedad menos deceleración y posterior aceleración habrá en el avance del corredor. Esto supone desde cierto punto de vista, el exclusivamente mecánico dejando aparte el metabolismo, un ahorro energético. Ahora bien, para alcanzar determinados niveles de fuerza, se hace necesario incurrir en consumos energéticos elevados -mayor actividad neural con la consiguiente fatiga del sistema nervioso e intervención de fibras de contracción más rápida- que no compensan el ahorro indicado. Sobre todo si los tendones del corredor no poseen una buena capacidad de acumular energía elástica.
Incluso en la carrera de máxima velocidad puede interesar no minimizar esta distancia a cualquier precio. Los velocistas siempre tendrían en sus manos -o en sus piernas- la posibilidad de reducir esa distancia al mínimo mediante una pisada blanda -como la que se realiza en los skipings, tal como si corriéramos descalzos sobre una superficie que pincha nuestros pies y no quisiéramos presionar con fuerza contra el suelo para no dañarnos-. No obstante, esto tiene un grave inconveniente. Si bien minimizando esa distancia, se puede reducir mucho el tiempo de apoyo -cosa fundamental en la carrera de alta velocidad- , ocurre que también se acorta con ello la duración de la fase de vuelo, ya que el tiempo de contacto se ha reducido a costa de un menor impulso. Como la fase de vuelo es aquella fase de zancada en la que llevamos más velocidad, sólo interesa reducir el tiempo de apoyo en una proporción mayor de la que se reduce la duración de la fase aérea.
Dicho de otro modo, el velocista puede minimizar la distancia de apoyo a que nos hemos referido, pero sólo hasta el momento en que la reducción del tiempo de apoyo se iguala a la reducción porcentual del tiempo de vuelo. Cuando se intenta acortar más esa distancia sucederá que la reducción del tiempo de vuelo será mayor que la reducción del tiempo de apoyo y, por consiguiente, perderemos velocidad.
Si ni siquiera en la carrera a máxima velocidad tiene sentido pisar lo más cerca posible de la proyección vertical del centro de masas, menos sentido tiene aún en las carreras de mediofondo y fondo. Sencillamente, pisar demasiado cerca de dicha proyección vertical exige que las fuerzas generadas sean mayores para mantener el impulso vertical que nos lleva a la siguiente fase aérea. Pero generar fuerzas mayores implica hacer uso innecesario de una mayor proporción de fibras de contracción rápida que se fatigarán prematuramente además de agotar antes el glucógeno muscular.
1- ¿Qué es debajo del centro de gravedad? ¿Se refiere a la proyección sobre el suelo de la línea vertical perpendicular al suelo que atraviesa el centro de gravedad? Tomemos como punto de partida que esto es así y vayamos al siguiente inconveniente.
2- Cuando nos referimos a pisar sobre la proyección vertical del centro de gravedad, ¿a qué nos estamos refiriendo con pisar sobre ese punto? Nuestro pie no es un punto, sino un volumen y una superficie. ¿Qué parte del pie debe coincidir con la proyección vertical del centro de masas? ¿El talón, la zona del metatarso, los dedos de los pies?
En mi opinión, cuando se trata de analizar cómo tiene lugar el contacto con el suelo, el concepto a utilizar es el centro de presiones, que es la superficie infinitesimal o punto donde tiene su origen la resultante de las fuerzas que tienen lugar en el contacto del pie con el suelo.
3- Hacer que el centro de presiones coincida con la proyección vertical del centro de gravedad sobre el suelo en el impacto con el suelo, dará lugar a que las fuerzas de frenado sean nulas o prácticamente nulas. Una vez que el centro de gravedad pase inmediatamente a estar por delante del centro de presiones, las fuerzas horizontales proveerán aceleración al corredor. No tiene sentido imprimir aceleración en cada zancada si antes no hemos frenado. Si no hay fuerzas de frenado, aceleraremos en cada fase de contacto. La aceleración positiva e indefinida será en algún momento insostenible. Habrá un momento en que la velocidad será tan elevada que no tendremos tiempo de contrarrestar la rotación hacia delante que tiene lugar en nuestro cuerpo durante la aceleración. Por tanto, acabaremos cayendo de bruces si seguimos la directriz de pisar por debajo del centro de gravedad.
Los que defienden que esta directriz es válida, minimizan los inconvenientes señalados añadiendo que la directriz no se refiere a pisar justamente debajo del centro de gravedad, sino un poco por detrás. Esto todavía da lugar a más inconvenientes, porque si antes al menos sabíamos que el centro de presiones tenía que coincidir con la proyección vertical sobre el suelo del centro de gravedad, ahora no sabemos a qué distancia por detrás del centro de gravedad hemos de pisar. ¿5 centímetros, 10 centímetros, 20, 40? ¿Cuánto es poco?
Entonces siempre hay alguien que nos dice: hay que minimizar la distancia entre el centro de presiones y la proyección vertical sobre el suelo del centro de masas. Cuanto menor sea la distancia, menos frenaremos en cada zancada, con el consiguiente ahorro energético. Este es un argumento que casi todos los que hablan de técnica de carrera suscriben. Sin embargo, como ahora demostraré, es totalmente erróneo, al menos si lo interpretamos en el sentido de que el atleta tiene que minimizar esa distancia cualesquiera que sean sus condiciones físicas, cualquiera que sea la velocidad a la que esté corriendo y cualquiera que sea su grado de fatiga.
Antes de analizar la cuestión, veamos una foto de Sebastian Coe corriendo un relevo de 4X800, a un ritmo en torno a 50-51 segundos los 400 metros (para que entiendan mejor los corredores de ruta, alrededor de 2'05" -2'07" los 1000 metros, entre 7,8 y 80 m/s, es decir, alrededor de 28 km/h, lo que no es un ritmo precisamente lento). Se puede observar que entre la proyección vertical del centro de masas y el centro de presiones hay una distancia considerable, en torno a unos 45 cm.

Minimizar la distancia entre el centro de presiones de la pisada en el momento del impacto y la proyección vertical del centro de gravedad sobre el suelo, supone que tendremos muy poco tiempo para contrarrestar el descenso del centro de masas que tiene lugar en la fase aérea y la subsiguiente elevación del centro de masas para iniciar la subsiguiente fase aérea. Cuanto menor sea ese tiempo, mayor será la fuerza que hemos de aplicar para lograr un determinado impulso que devuelva el centro de masas a la altura alcanzada en la fase de vuelo anterior, ya que el impulso es el sumatorio del producto de las fuerzas por los intervalos de tiempo en que éstas se aplican.
Por tanto, minimizar la distancia referida implica aumentar la fuerza. No hemos de olvidar que la fuerza es un factor limitante. No tenemos una fuerza ilimitada. Tampoco todos los tendones tienen la misma rigidez y la misma tasa de retorno de energía elástica. Por lo tanto, no se puede afirmar como regla general que minimizar la distancia entre nuestro centro de presiones y la proyección vertical sobre el suelo del centro de masas sea algo favorable en cualquier supuesto. Ni siquiera es siempre posible reducir esa distancia. Podemos ir reduciendo esa distancia pero nos encontraremos con una de las dos siguintes circunstancias:
1- No tenemos fuerza para seguir reduciendo esa distancia.
2-Sí que disponemos de la fuerza necesaria para reducir esa distancia, pero ese aumento de la fuerza implica un incremento del gasto energético que no se compensa con el ahorro que deriva de la disminución del impulso de frenado y de posterior aceleración.
Está claro que cuanto más cerca pisemos de la proyección del centro de gravedad menos deceleración y posterior aceleración habrá en el avance del corredor. Esto supone desde cierto punto de vista, el exclusivamente mecánico dejando aparte el metabolismo, un ahorro energético. Ahora bien, para alcanzar determinados niveles de fuerza, se hace necesario incurrir en consumos energéticos elevados -mayor actividad neural con la consiguiente fatiga del sistema nervioso e intervención de fibras de contracción más rápida- que no compensan el ahorro indicado. Sobre todo si los tendones del corredor no poseen una buena capacidad de acumular energía elástica.
Incluso en la carrera de máxima velocidad puede interesar no minimizar esta distancia a cualquier precio. Los velocistas siempre tendrían en sus manos -o en sus piernas- la posibilidad de reducir esa distancia al mínimo mediante una pisada blanda -como la que se realiza en los skipings, tal como si corriéramos descalzos sobre una superficie que pincha nuestros pies y no quisiéramos presionar con fuerza contra el suelo para no dañarnos-. No obstante, esto tiene un grave inconveniente. Si bien minimizando esa distancia, se puede reducir mucho el tiempo de apoyo -cosa fundamental en la carrera de alta velocidad- , ocurre que también se acorta con ello la duración de la fase de vuelo, ya que el tiempo de contacto se ha reducido a costa de un menor impulso. Como la fase de vuelo es aquella fase de zancada en la que llevamos más velocidad, sólo interesa reducir el tiempo de apoyo en una proporción mayor de la que se reduce la duración de la fase aérea.
Dicho de otro modo, el velocista puede minimizar la distancia de apoyo a que nos hemos referido, pero sólo hasta el momento en que la reducción del tiempo de apoyo se iguala a la reducción porcentual del tiempo de vuelo. Cuando se intenta acortar más esa distancia sucederá que la reducción del tiempo de vuelo será mayor que la reducción del tiempo de apoyo y, por consiguiente, perderemos velocidad.
Si ni siquiera en la carrera a máxima velocidad tiene sentido pisar lo más cerca posible de la proyección vertical del centro de masas, menos sentido tiene aún en las carreras de mediofondo y fondo. Sencillamente, pisar demasiado cerca de dicha proyección vertical exige que las fuerzas generadas sean mayores para mantener el impulso vertical que nos lleva a la siguiente fase aérea. Pero generar fuerzas mayores implica hacer uso innecesario de una mayor proporción de fibras de contracción rápida que se fatigarán prematuramente además de agotar antes el glucógeno muscular.
domingo, 12 de febrero de 2017
La técnica de carrera desde una perspectiva mecánica.
La técnica de carrera se puede analizar desde dos perspectivas: una gestual -o cinemática- y una mecánica. La primera implica que se prestará atención al gesto realizado por el corredor. La segunda presta atención a las fuerzas que se originan en la carrera.
La perspectiva cinemática es la más habitual, quizá por ser más acorde con la definición de técnica. Mientras que la fuerza y las aptitudes metabólicas de un corredor no son visibles, sí lo es la forma en que corre. Por tanto, la técnica se suele considerar el elemento visual del correr, apreciable por el entrenador, mientras que para medir la fuerza o la resistencia hemos de atender a otros medios indirectos, tales como el cronómetro, las plataformas de fuerza y el análisis de fotogramas para determinar el tiempo de vuelo y el de apoyo para establecer un cociente entre el primero y el segundo que será indicativo del nivel de fuerza generado en el apoyo.
El problema de la perspectiva cinemática o gestual es que adopta un método meramente estadístico. Es decir, que según el mismo el entrenador debe promover aquellos gestos que estadísticamente han dado buen resultado a los atletas de mejor nivel en su especialidad. Lo que sucede es que la estadística sólo nos puede decir cómo es, en promedio, aquello que suele funcionar bien, pero no nos dice por qué funciona bien. En la entrada anterior se hacía referencia a atletas que corrían de una forma visiblemente distinta a como solían correr los demás especialistas y que obtenían muy buenos resultados. Especialmente llamativo era el caso de Michael Johnson en 200 y 400 metros y Juantorena en 400 y 800. Ambos estilos de carrera tienen muy poco que ver, en el caso de Johnson por el escaso rango de movimiento y en el caso de Juantorena por lo amplísimo de dicho rango. Ambos corredores tienen un correr que en lo que a ángulos articulares se refiere, se encuentran por debajo (en el caso de Johnson) y por encima (en el caso de Juantorena) de la media. Un enfoque cinemático de la técnica de carrera no permitiría pronosticar que estos dos corredores obtendrían magníficos resultados en sus pruebas, o bien nos obligaría a decir que su técnica es deficiente solo que la suplían con una potencia muscular descomunal. A mi juicio, ambos corredores aprovechaban de forma casi óptima su anatomía, pero esto no puede ser explicado atendiendo sólo a los aspectos comunes de la zancada de los mejores corredores.
En el lanzamiento de un dado sabemos que un número sale 1 de cada 6 veces y en la ruleta francesa un número sale 1 de 37 veces. ¿Por qué sabemos esto? Si adoptáramos una perspectiva estadística, podríamos responder que porque en 6.000.000 de tiradas cada uno de los números ha salido entre 999.237 veces (el que menos) y 1.000.950 veces (el que más), según cual sea el número escogido, pero que de forma muy aproximada se trata de una probabilidad de 1 a 6. O en el caso de la ruleta porque los distintos números han salido,en 37.000.000 de tiradas entre 999.120 veces (el que menos) y 1.000.986 (el que más), es decir, que todos ellos tendían a salir aproximadamente 1 vez de cada 37. En realidad, la causa de que los números salgan con la frecuencia indicada en el caso del dado es que se trata de un cubo casi perfecto con una masa homogéneamente distribuida. En el caso de la ruleta, que cada una de las casillas tiene prácticamente la misma anchura y sus bordes tengan el mismo material, además de que los números se disponen en una circunferencia perfecta y el eje alrededor del cual rota la misma no está sometido a desviaciones laterales considerables. Si la ruleta estuviera permanentemente inclinada hacia un lado en un ángulo lo bastante amplio, es probable que ciertos números salieran mucho más que otros. Si el material que delimita las casillas fuera de madera en unos números y de metal en otros, es probable que ello diera ventaja a aquellas casillas que menos resistencia ofrecen a que la bola entre en ellas. La causa de que algo ocurra debe determinarse prestando atención a la realidad física del fenómeno observado y no a la distribución estadística de los fenómenos acaecidos. La estadística es una consecuencia de los condicionantes físicos del fenómeno observado, de modo que por sí sola no explica nada.
En el caso de la carrera a pie, promover un gesto que trate de aproximar los ángulos articulares en cada fase de la carrera al promedio de los ángulos medidos en los mejores especialistas, no garantiza en absoluto que estemos sacando el máximo provecho del potencial de un corredor. Sin embargo, este es el método que utiliza Ralph Mann, autor de "Mechanics of sprintig and hurdling", como se pone de manifiesto con la lectura del libro y se aprecia en algún vídeo donde se expone lo esencial de su metodología, que no comparto. Clyde Hart, el entrenador de Michael Johnson, afirmaba que estuvo tentado de corregir la zancada de Johnson, pero que como funcionaba era mejor no tocar nada. ¿Qué hubiera sucedido si hubiera intentado asimilar la técnica de Johnson a la de otros velocistas de estilo más convencional como Frederics? Probablemente hubiera fracasado. También, a mi juicio, habría sido un error obligar a Juantorena a una zancada más convencional, más corta, más inacabada, más similar a la de los mejores cuatrocentistas.
En este blog, desde sus comienzos, se ha postulado que un entrenador debe pensárselo mucho antes de proponer un cambio técnico de su corredor. Ante todo debe analizar cómo es su cuerpo, cómo es la longitud del fémur en relación a la tibia, cómo es la forma de su columna y el ángulo de la pelvis respecto a la zona lumbar, así como determinar la distribución de su masa corporal. Sólo con estos datos se puede decir en determinados casos si el corredor está obteniendo o no provecho e su propia estructura. Esto último es, básicamente, la técnica: sacar el mejor provecho de lo que se tiene y que sea el entrenador el que adapte la forma de correr a la constitución del atleta, y no tratar de adaptar la constitución del atleta al modelo de carrera que el entrenador tiene en mente. Simplemente porque esto último es imposible: la constitución en su mayor parte no se puede modificar y a menudo si modificamos algo tiende a ser a peor, puesto que hemos forzado al cuerpo a adoptar posiciones en la carrera para la que su estructura de origen no era óptima.
Del mismo modo que un entrenador de fútbol con futbolistas mediocres hará bien en potenciar el aspecto físico y defensivo y hará mal en adoptar el mismo enfoque si dispone de futbolistas con gran capacidad de control, regate y pase, en el entrenamiento de la técnica de carrera es el entrenador el que debe individualizar la técnica en función de la estructura del atleta. Casi siempre es más cierto que el órgano hace la función que su inversa, la función hace el órgano. Esta última puede ser cierta, pero de un modo mucho más limitado.
Únicamente el enfoque mecánico basado en el análisis de fuerza permite obtener provecho de las aptitudes de un corredor concreto. No se deben promover cambios técnicos sin antes haberse planteado por qué nuestro atleta corre de la manera que lo hace y en qué sentido esa técnica es la consecuencia de su estructura. Sólo cuando tras un análisis cuidadoso hemos llegado a la conclusión de que cierto aspecto de la técnica de dicho corredor no es una consecuencia inevitable de su estructura, tiene sentido promover un cambio gestual.
sábado, 4 de febrero de 2017
El ciclo anterior.
Es habitual oír expresiones tales como "para mejorar la técnica hay que potenciar la carrera en ciclo anterior" o "los corredores no entrenados suelen correr en ciclo posterior". En inglés se utilizan las expresiones front side mechanics y back side mechanics para referirse, respectivamente a ciclo anterior y posterior, respectivamente. Pero, ¿qué es el ciclo anterior?
Se suele denominar ciclo anterior al movimiento de (o dicho de otro modo, al área barrida por) la extremidad inferior que tiene lugar por delante de la pelvis. Si atravesamos al corredor con un plano frontal perpendicular al suelo que atraviesa el centro de masas del corredor y que divide el volumen del corredor en dos partes, la delantera y la trasera, consideraremos que la acción de los segmentos de la pierna que sucede por delante de dicho plano tienen lugar en ciclo anterior. Por tanto, las acciones de segmentos de la pierna que sucedan por detrás de dicho plano tienen lugar en ciclo posterior.
En el libro de Ralph Mann (subcampeón olímpico de 400 vallas en Montral 1976) "Mechanics of sprinting and hurdling" se traza una linea longitudinal al tronco para apreciar lo que sucede delante y detrás de esa línea. A lo que sucede delante se le denomina front side mechanics y a lo que sucede detrás back side mechanics. Lo que ocurre es que Mann, a diferencia de otros autores, sigue la línea del tronco, mientras que en la distinción entre ciclo anterior y posterior se sigue una línea perpendicular al suelo. Al estar el tronco ligeramente inclinado en la carrera (de 5 a 10 grados, normalmente) hay una ligera diferencia entre ambas concepciones.
 Imagen extraída de Mechanics of sprinting and hurdling, de Ralph Mann
Imagen extraída de Mechanics of sprinting and hurdling, de Ralph Mann
Acto seguido se plasman secuencias de corredores de velocidad (Donald Quarrie), medio fondo (Seb Coe) y fondo (Alberto Cova), donde el lector puede apreciar qué proporción del movimiento de piernas tiene lugar en ciclo anterior y en ciclo posterior a los ritmos propios de una carrera de 200 metros, 800 metros y 10.000 metros, respectivamente.

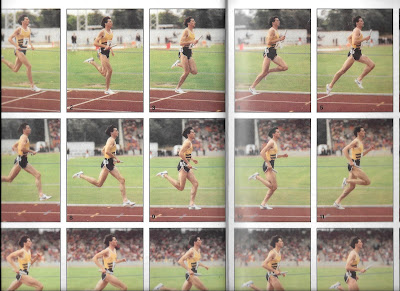
 Imagenes de Athletes in action, de Howard Payne.
Imagenes de Athletes in action, de Howard Payne.
Lo que a mí siempre me ha intrigado acerca de la dicotomía "ciclo anterior - ciclo posterior" es determinar qué utilidad tiene a la hora de establecer unas nociones técnicas para la carrera a distintas velocidades. Desde el punto de vista mecánico, no hay una diferencia cualitativa entre el correr a ritmo de 10.000 y correr a ritmo de 100 metros. Naturalmente sí que hay una diferencia cuantitativa, pero en lo que se refiere a la esencia del correr, caracterizado por una fase aérea y una fase de contacto y, dentro de ésta, una subfase de frenado y otra de aceleración en sentido de la marcha, no se aprecian diferencias. La alternancia de brazos y de piernas, la rotación de tórax respecto a pelvis ocurren del mismo modo a todos los ritmos de carrera. Lo único que cambia es la amplitud del movimiento de las extremidades (mayor cuanto más alta es la velocidad velocidad) y la duración de cada zancada (mayor cuanto mayor es la velocidad). De modo que correr rápido, entendido desde un punto de vista mecánico cualitativo, no es distinto a correr despacio. Por tanto, desde una perspectiva meramente mecánica, no tiene sentido dar consignas diferentes al corredor de corta distancia que al corredor de media y larga distancia. Sí que tendría sentido si se analizara la técnica de carrera desde una perspectiva cinemática o gestual, enfoque que el autor de este blog no comparte.
La mayor elevación de la rodilla de la pierna adelantada en la carrera de velocidad no es el resultado de una técnica distinta sino una consecuencia del mero hecho de que la fase de recuperación de la pierna atrasada tras el despegue se ha de realizar en un intervalo más breve, porque de lo contrario no podría mantenerse la velocidad. Si se dispone de menos tiempo es evidente que ciertas acciones se deben anticipar. Correr más rápido implica ciclos más breves -siempre un apoyo más breve y a velocidades que se acercan al máximo, fases aéreas también más breves- y, como consecuencia, posiciones distintas en función del tiempo transcurrido. En cuanto a la amplitud del movimiento de piernas, no hay una diferencia sustancial entre la carrera de media distancia y la de corta distancia, donde a menudo los rangos de movimiento son similares. La diferencia que se aprecia a simple vista entre la velocidad y el medio fondo es que aunque los ángulos máximos entre ambos fémures en el inicio de la fase aérea son similares, en la carrera de corta distancia la rodilla adelantada está más elevada y la pierna que acaba de despegar más perpendicular al suelo, mientras que en la carrera de media distancia la pierna que acaba de despegar opera en un ciclo más posterior. Esto último sucede porque en la carrera a altas velocidades (100 y 200 m) la duración de la fase aérea se reduce debido a que el tiempo de contacto excesivamente breve y aunque la fuerza promedio que el corredor genera contra el suelo es mayor, ya no se puede generar el mismo impulso de modo que la fase aérea se ve reducida. Al reducirse la duración de la fase aérea, la pierna que acaba de despegar debe recuperar su posición en un intervalo más breve, de modo que tras el despegue la pierna más atrasada apenas se desplaza hacia atrás (no se completa la extensión de columna lumbar y de cadera haciendo el ciclo más posterior, tal como ocurre en la carrera de media y larga distancia). En cambio, en carreras de 400 en adelante no hay una diferencia visible en la manera de correr desde la perspectiva de la dicotomía "ciclo anterior- ciclo posterior". Sí que se apreciarán diferencias en la amplitud del movimiento del tronco y las extremidades. La citada diferencia será mayor si se compara corredores de elevada longitud de piernas.. Entre el Juantorena que corre 400 y el que corre 800 la gran diferencia que se aprecia es la amplitud del ciclo, pero no se ve un ciclo más anterior en la carrera de 400 que en la de 800, sino un mayor ángulo máximo de apertura entre ambos fémures al inicio del despegue. Algunos corredores de medio fondo como Steve Cram, tal como se aprecia en la imagen inferior, pueden correr con amplitudes de movimientos de brazos y piernas similares a los de un velocista, aunque con un ciclo más posterior, merced a una fase aérea de mayor duración al ritmo de de medio fondo.
 Imagen de Athletes in action, de Howard Payne.
Imagen de Athletes in action, de Howard Payne.
El entrenador francés Jacques Piasenta ponía mucho énfasis en anteriorizar el ciclo de los velocistas y, a mi juicio, lograba buenos resultados no tanto por la teoría que esgrimía, sino por su intuición como entrenador que conocía las distintas especialidades atléticas. Sus métodos tenían sentido en tanto que intuitivamente se apreciaba que los corredores que su juicio corrían con el ciclo posterior no estaban maximizando todo su potencial. Era el caso de Maria Jose Perec en sus primeras etapas. Pero la justificación teórica que él ofrecía, a mi juicio, no era convincente y puede dar lugar a equívocos. El problema que presentaban muchos de los corredores de los que en este documental él afirmaba que corrían en ciclo posterior era, fundamentalmente, una inclinación excesiva del tronco hacia delante. Dicha inclinación no es aconsejable ni en velocidad ni en fondo. En velocidad porque no permite aprovechar todo el rango de movimiento de que dispone el corredor, ya que al bascular la pelvis hacia delante (lo que en inglés llaman forward tilt y que se podría traducir como anteversión pélvica) merced a la inclinación del tronco, el balanceo hacia delante de la pierna libre se ve limitado por el rango máximo de flexión de cadera, con lo que la amplitud de zancada se ve reducida y el corredor debe lograr una frecuencia mayor, lo que no siempre es posible. En las carreras de media y larga distancia una inclinación excesiva del tronco provoca una mayor demanda de fuerza de la musculatura lumbar y glútea para evitar la caída del tronco hacia delante, con la consiguiente crispación y fatiga prematura.
De hecho, algunos de las técnicas defectuosas que se suelen calificar como carrera pendular en ciclo posterior, a menudo se suelen corregir pidiéndole al corredor que enderece el tronco, una instrucción bastante sencilla de asimilar para el corredor. Los ejercicios realizados corriendo sobre vallas bajas- como mucho a la altura de las rodillas- tienen como principal virtud enseñar al corredor a no disparar la tibia hacia delante a la vez que se flexiona la cadera, de modo que primero se flexiona la cadera y sólo cuando el grado de flexión de ésta es elevado, se permite la extensión de la rodilla o despliegue de la pierna de ataque (la que se balancea hacia delante). Hay corredores que corren con el tronco erguido pero despliegan demasiado rápido la pierna de ataque, con lo cual pierden amplitud de zancada. Esto último no implica que se corra con un ciclo más posterior, sino que cuando la tibia avanza demasiado rápido hacia delante la cadera obligatoriamente tiene que extenderse para que se mantenga el momento angular de la pierna. La única manera de lograr una flexión de cadera amplia a la vez que se extiende la rodilla sería inclinar el tronco hacia delante, cosa de todo punto indeseable, como se ha hecho notar anteriormente.
En resumen, los conceptos de ciclo anterior y ciclo posterior responden a una visión cinemática de la técnica de carrera, donde el entrenador trata de aproximar el gesto del atleta al gesto ideal que tiene en mente. Esto choca con la visión mecánica de la técnica de carrera que se defiende en este blog. El movimiento es una consecuencia de la fuerza y no a la inversa. No se trata de lograr gestos ideales, sino de que el corredor respete su propia anatomía y, en función de éstas, logre optimizar las fuerzas que le permiten correr de modo más eficiente.
Por ejemplo, la forma de la columna, el ángulo que forman unas vértebras con otras en la posición anatómica incidirá en las posiciones que el corredor adopte a la hora de correr. ¿No corre Michael Johnson en un ciclo exageradamente posterior para ser un corredor de 200? La respuesta es que su entrenador no logró mejorar su eficacia llevándole a un gesto más estándar de velocista y la causa más probable es que en su posición anatómica su pelvis se hallara en un grado elevado de anteversión. Si como algunos entrenadores -a mi juicio erróneamente- pretenden, Johnson hubiera colocado su pelvis en mayor retroversión, su tronco hubiera estado inclinado hacia atrás llevándole a una postura completamente inadecuada para generar fuerzas. Los ángulos que forman las vértebras entre sí, o que forma el sacro con la línea que une la parte más elevada de las crestas ilíacas con el pubis, así como los rangos de movimiento de cadera, condicionan sobremanera la elevación de rodilla que un corredor podrá mantener cuando corre a una velocidad dada. Dar instrucciones técnicas basadas en un modelo ideal tiende a violentar la anatomía del corredor. Sin embargo, si nos basamos en la estructura esquelética del corredor y a partir de ahí trabajamos para que la generación de fuerzas sea óptima, estaremos en el buen camino. Solo que es más fácil tratar de que un atleta imite un gesto que entender cómo operan las fuerzas en la carrera y cómo inciden los músculos en su generación en función de las posiciones articulares.
Se suele denominar ciclo anterior al movimiento de (o dicho de otro modo, al área barrida por) la extremidad inferior que tiene lugar por delante de la pelvis. Si atravesamos al corredor con un plano frontal perpendicular al suelo que atraviesa el centro de masas del corredor y que divide el volumen del corredor en dos partes, la delantera y la trasera, consideraremos que la acción de los segmentos de la pierna que sucede por delante de dicho plano tienen lugar en ciclo anterior. Por tanto, las acciones de segmentos de la pierna que sucedan por detrás de dicho plano tienen lugar en ciclo posterior.
En el libro de Ralph Mann (subcampeón olímpico de 400 vallas en Montral 1976) "Mechanics of sprinting and hurdling" se traza una linea longitudinal al tronco para apreciar lo que sucede delante y detrás de esa línea. A lo que sucede delante se le denomina front side mechanics y a lo que sucede detrás back side mechanics. Lo que ocurre es que Mann, a diferencia de otros autores, sigue la línea del tronco, mientras que en la distinción entre ciclo anterior y posterior se sigue una línea perpendicular al suelo. Al estar el tronco ligeramente inclinado en la carrera (de 5 a 10 grados, normalmente) hay una ligera diferencia entre ambas concepciones.

Acto seguido se plasman secuencias de corredores de velocidad (Donald Quarrie), medio fondo (Seb Coe) y fondo (Alberto Cova), donde el lector puede apreciar qué proporción del movimiento de piernas tiene lugar en ciclo anterior y en ciclo posterior a los ritmos propios de una carrera de 200 metros, 800 metros y 10.000 metros, respectivamente.



Lo que a mí siempre me ha intrigado acerca de la dicotomía "ciclo anterior - ciclo posterior" es determinar qué utilidad tiene a la hora de establecer unas nociones técnicas para la carrera a distintas velocidades. Desde el punto de vista mecánico, no hay una diferencia cualitativa entre el correr a ritmo de 10.000 y correr a ritmo de 100 metros. Naturalmente sí que hay una diferencia cuantitativa, pero en lo que se refiere a la esencia del correr, caracterizado por una fase aérea y una fase de contacto y, dentro de ésta, una subfase de frenado y otra de aceleración en sentido de la marcha, no se aprecian diferencias. La alternancia de brazos y de piernas, la rotación de tórax respecto a pelvis ocurren del mismo modo a todos los ritmos de carrera. Lo único que cambia es la amplitud del movimiento de las extremidades (mayor cuanto más alta es la velocidad velocidad) y la duración de cada zancada (mayor cuanto mayor es la velocidad). De modo que correr rápido, entendido desde un punto de vista mecánico cualitativo, no es distinto a correr despacio. Por tanto, desde una perspectiva meramente mecánica, no tiene sentido dar consignas diferentes al corredor de corta distancia que al corredor de media y larga distancia. Sí que tendría sentido si se analizara la técnica de carrera desde una perspectiva cinemática o gestual, enfoque que el autor de este blog no comparte.
La mayor elevación de la rodilla de la pierna adelantada en la carrera de velocidad no es el resultado de una técnica distinta sino una consecuencia del mero hecho de que la fase de recuperación de la pierna atrasada tras el despegue se ha de realizar en un intervalo más breve, porque de lo contrario no podría mantenerse la velocidad. Si se dispone de menos tiempo es evidente que ciertas acciones se deben anticipar. Correr más rápido implica ciclos más breves -siempre un apoyo más breve y a velocidades que se acercan al máximo, fases aéreas también más breves- y, como consecuencia, posiciones distintas en función del tiempo transcurrido. En cuanto a la amplitud del movimiento de piernas, no hay una diferencia sustancial entre la carrera de media distancia y la de corta distancia, donde a menudo los rangos de movimiento son similares. La diferencia que se aprecia a simple vista entre la velocidad y el medio fondo es que aunque los ángulos máximos entre ambos fémures en el inicio de la fase aérea son similares, en la carrera de corta distancia la rodilla adelantada está más elevada y la pierna que acaba de despegar más perpendicular al suelo, mientras que en la carrera de media distancia la pierna que acaba de despegar opera en un ciclo más posterior. Esto último sucede porque en la carrera a altas velocidades (100 y 200 m) la duración de la fase aérea se reduce debido a que el tiempo de contacto excesivamente breve y aunque la fuerza promedio que el corredor genera contra el suelo es mayor, ya no se puede generar el mismo impulso de modo que la fase aérea se ve reducida. Al reducirse la duración de la fase aérea, la pierna que acaba de despegar debe recuperar su posición en un intervalo más breve, de modo que tras el despegue la pierna más atrasada apenas se desplaza hacia atrás (no se completa la extensión de columna lumbar y de cadera haciendo el ciclo más posterior, tal como ocurre en la carrera de media y larga distancia). En cambio, en carreras de 400 en adelante no hay una diferencia visible en la manera de correr desde la perspectiva de la dicotomía "ciclo anterior- ciclo posterior". Sí que se apreciarán diferencias en la amplitud del movimiento del tronco y las extremidades. La citada diferencia será mayor si se compara corredores de elevada longitud de piernas.. Entre el Juantorena que corre 400 y el que corre 800 la gran diferencia que se aprecia es la amplitud del ciclo, pero no se ve un ciclo más anterior en la carrera de 400 que en la de 800, sino un mayor ángulo máximo de apertura entre ambos fémures al inicio del despegue. Algunos corredores de medio fondo como Steve Cram, tal como se aprecia en la imagen inferior, pueden correr con amplitudes de movimientos de brazos y piernas similares a los de un velocista, aunque con un ciclo más posterior, merced a una fase aérea de mayor duración al ritmo de de medio fondo.

El entrenador francés Jacques Piasenta ponía mucho énfasis en anteriorizar el ciclo de los velocistas y, a mi juicio, lograba buenos resultados no tanto por la teoría que esgrimía, sino por su intuición como entrenador que conocía las distintas especialidades atléticas. Sus métodos tenían sentido en tanto que intuitivamente se apreciaba que los corredores que su juicio corrían con el ciclo posterior no estaban maximizando todo su potencial. Era el caso de Maria Jose Perec en sus primeras etapas. Pero la justificación teórica que él ofrecía, a mi juicio, no era convincente y puede dar lugar a equívocos. El problema que presentaban muchos de los corredores de los que en este documental él afirmaba que corrían en ciclo posterior era, fundamentalmente, una inclinación excesiva del tronco hacia delante. Dicha inclinación no es aconsejable ni en velocidad ni en fondo. En velocidad porque no permite aprovechar todo el rango de movimiento de que dispone el corredor, ya que al bascular la pelvis hacia delante (lo que en inglés llaman forward tilt y que se podría traducir como anteversión pélvica) merced a la inclinación del tronco, el balanceo hacia delante de la pierna libre se ve limitado por el rango máximo de flexión de cadera, con lo que la amplitud de zancada se ve reducida y el corredor debe lograr una frecuencia mayor, lo que no siempre es posible. En las carreras de media y larga distancia una inclinación excesiva del tronco provoca una mayor demanda de fuerza de la musculatura lumbar y glútea para evitar la caída del tronco hacia delante, con la consiguiente crispación y fatiga prematura.
De hecho, algunos de las técnicas defectuosas que se suelen calificar como carrera pendular en ciclo posterior, a menudo se suelen corregir pidiéndole al corredor que enderece el tronco, una instrucción bastante sencilla de asimilar para el corredor. Los ejercicios realizados corriendo sobre vallas bajas- como mucho a la altura de las rodillas- tienen como principal virtud enseñar al corredor a no disparar la tibia hacia delante a la vez que se flexiona la cadera, de modo que primero se flexiona la cadera y sólo cuando el grado de flexión de ésta es elevado, se permite la extensión de la rodilla o despliegue de la pierna de ataque (la que se balancea hacia delante). Hay corredores que corren con el tronco erguido pero despliegan demasiado rápido la pierna de ataque, con lo cual pierden amplitud de zancada. Esto último no implica que se corra con un ciclo más posterior, sino que cuando la tibia avanza demasiado rápido hacia delante la cadera obligatoriamente tiene que extenderse para que se mantenga el momento angular de la pierna. La única manera de lograr una flexión de cadera amplia a la vez que se extiende la rodilla sería inclinar el tronco hacia delante, cosa de todo punto indeseable, como se ha hecho notar anteriormente.
En resumen, los conceptos de ciclo anterior y ciclo posterior responden a una visión cinemática de la técnica de carrera, donde el entrenador trata de aproximar el gesto del atleta al gesto ideal que tiene en mente. Esto choca con la visión mecánica de la técnica de carrera que se defiende en este blog. El movimiento es una consecuencia de la fuerza y no a la inversa. No se trata de lograr gestos ideales, sino de que el corredor respete su propia anatomía y, en función de éstas, logre optimizar las fuerzas que le permiten correr de modo más eficiente.
Por ejemplo, la forma de la columna, el ángulo que forman unas vértebras con otras en la posición anatómica incidirá en las posiciones que el corredor adopte a la hora de correr. ¿No corre Michael Johnson en un ciclo exageradamente posterior para ser un corredor de 200? La respuesta es que su entrenador no logró mejorar su eficacia llevándole a un gesto más estándar de velocista y la causa más probable es que en su posición anatómica su pelvis se hallara en un grado elevado de anteversión. Si como algunos entrenadores -a mi juicio erróneamente- pretenden, Johnson hubiera colocado su pelvis en mayor retroversión, su tronco hubiera estado inclinado hacia atrás llevándole a una postura completamente inadecuada para generar fuerzas. Los ángulos que forman las vértebras entre sí, o que forma el sacro con la línea que une la parte más elevada de las crestas ilíacas con el pubis, así como los rangos de movimiento de cadera, condicionan sobremanera la elevación de rodilla que un corredor podrá mantener cuando corre a una velocidad dada. Dar instrucciones técnicas basadas en un modelo ideal tiende a violentar la anatomía del corredor. Sin embargo, si nos basamos en la estructura esquelética del corredor y a partir de ahí trabajamos para que la generación de fuerzas sea óptima, estaremos en el buen camino. Solo que es más fácil tratar de que un atleta imite un gesto que entender cómo operan las fuerzas en la carrera y cómo inciden los músculos en su generación en función de las posiciones articulares.
Suscribirse a:
Entradas (Atom)